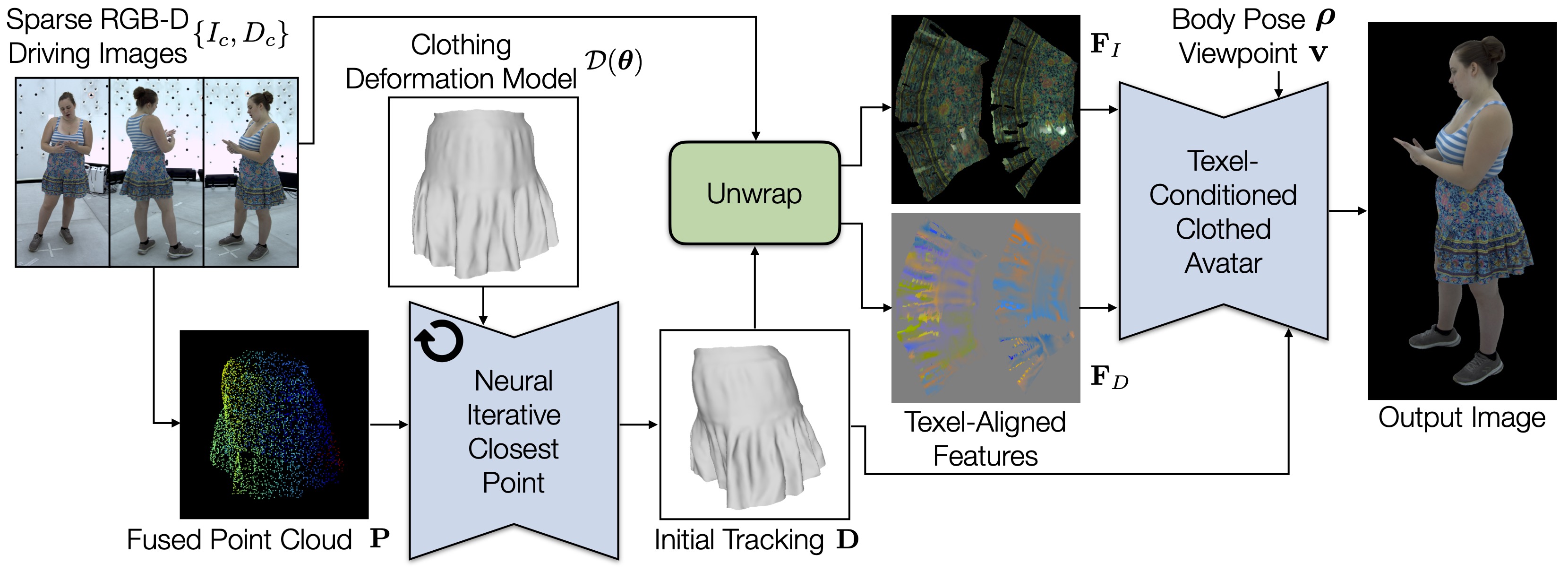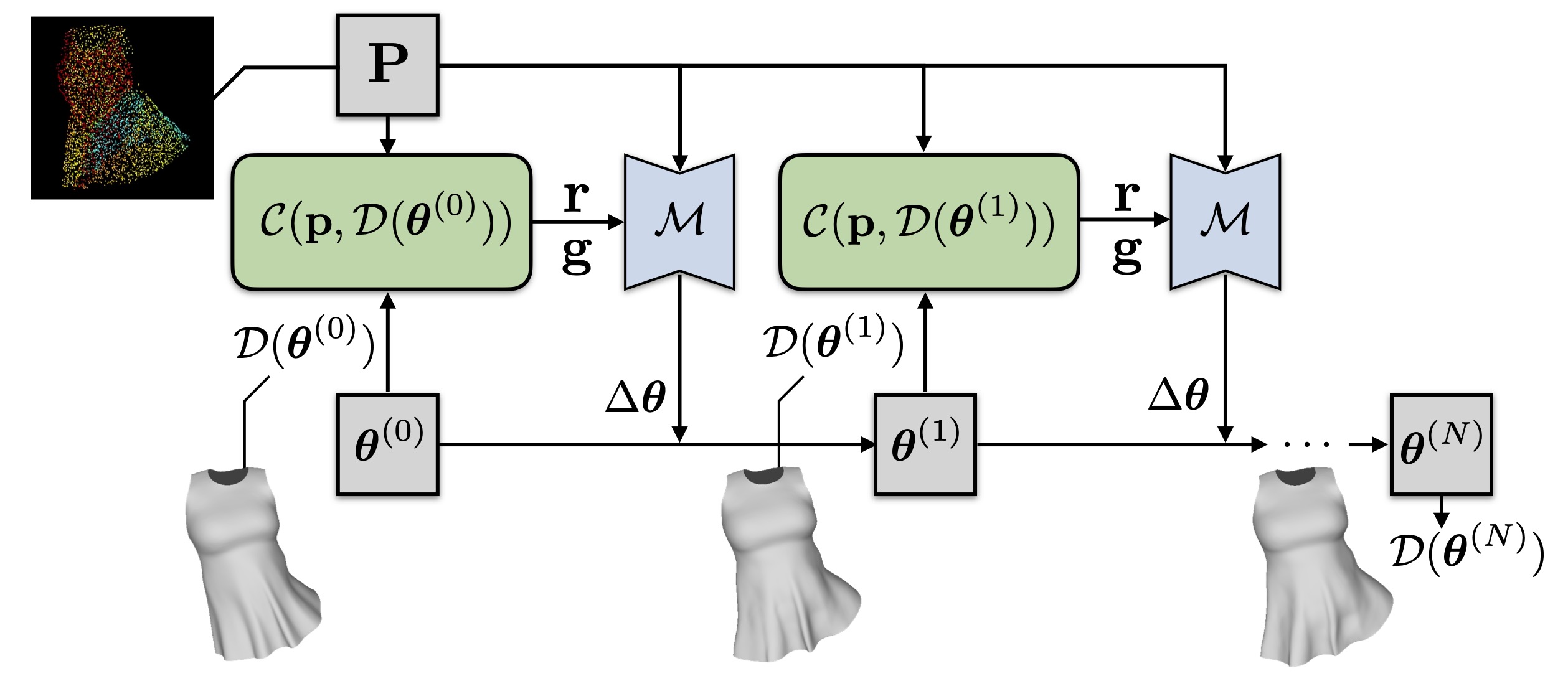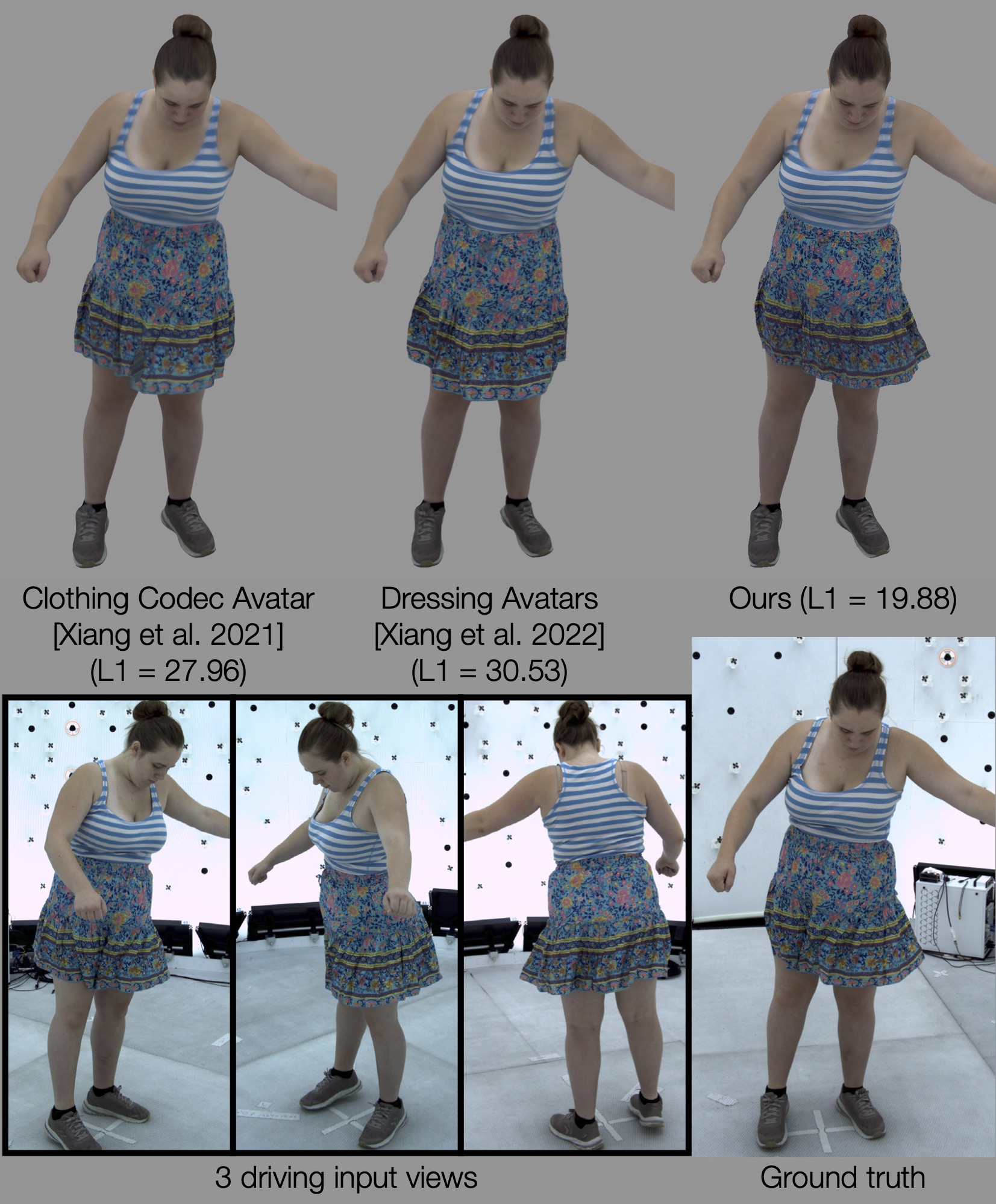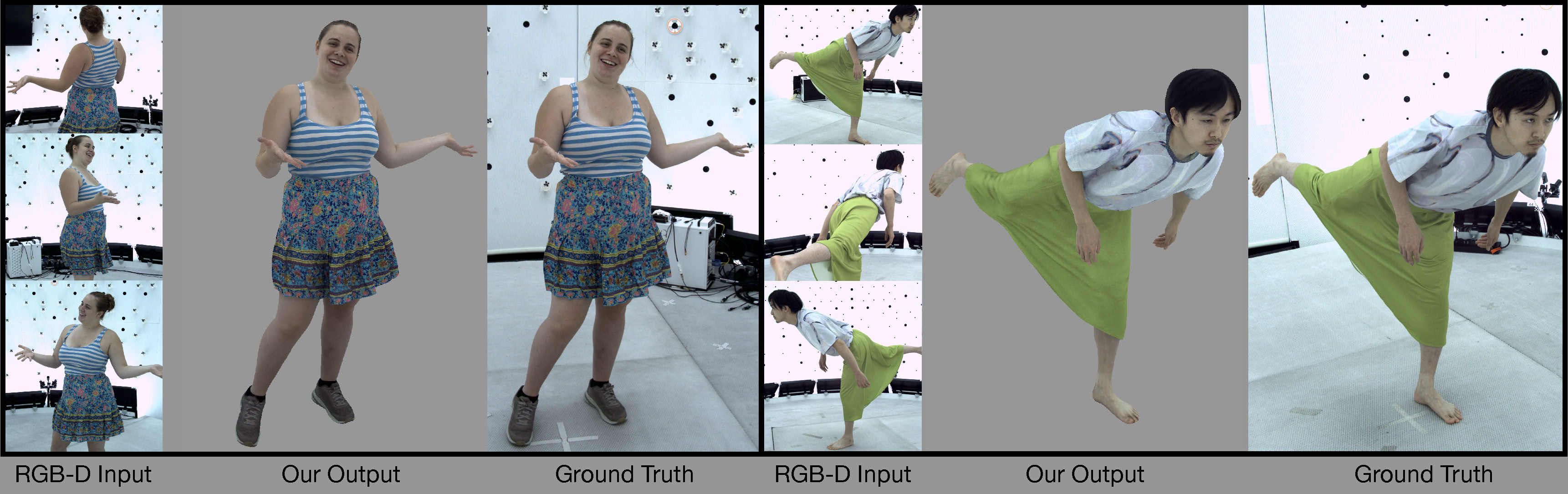
Clothing is an important part of human appearance but challenging to model in photorealistic avatars. In this work we present avatars with dynamically moving loose clothing that can be faithfully driven by sparse RGB-D inputs as well as body and face motion. We propose a Neural Iterative Closest Point (N-ICP) algorithm that can efficiently track the coarse garment shape given sparse depth input. Given the coarse tracking results, the input RGB-D images are then remapped to texel-aligned features, which are fed into the drivable avatar models to faithfully reconstruct appearance details. We evaluate our method against recent image-driven synthesis baselines, and conduct a comprehensive analysis of the N-ICP algorithm. We demonstrate that our method can generalize to a novel testing environment, while preserving the ability to produce high-fidelity and faithful clothing dynamics and appearance.